概览
约束满足问题(Constraint Satisfaction Problems, CSPs)与寻路问题不同,CSP通常不关心如何到达一个解(路径是trivial的),而只关心最终的解本身是否满足一系列给定的约束(规则)。
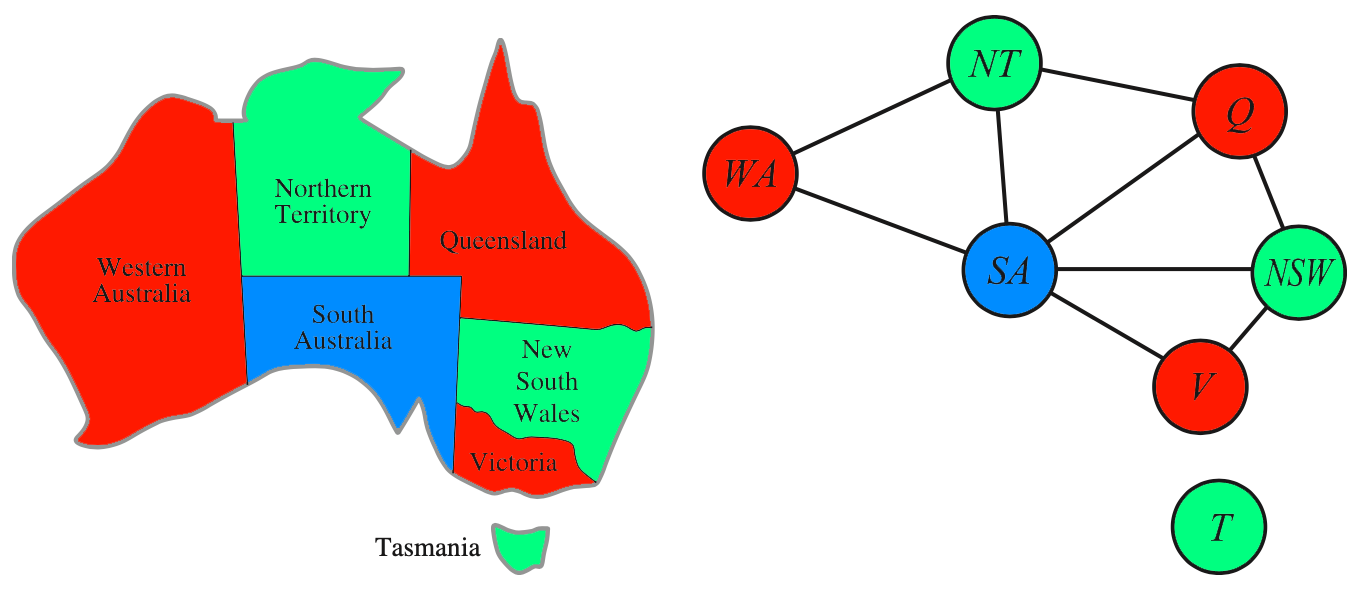
许多看似无关的问题,如地图着色、课程表安排、数独求解等,都可以被抽象为CSP模型,从而使用一套通用的算法来解决。
通用问题框架
一个CSP问题由三个核心部分组成:
- 变量 (Variables):一组需要被赋值的对象
X = {X_1, X_2, ..., X_n}。- 例如,在地图着色中,变量就是每一个地区。
- 域 (Domains):每个变量
X_i可以被赋予的值的集合,表示为D_i。- 域可以是离散有限的(如颜色集合),也可以是连续的。本文主要关注离散有限域。
- 例如,在地图着色中,域就是颜色的集合
{红色, 绿色, 蓝色}。
- 约束 (Constraints)
- 规定了变量可以同时取哪些值的规则。一个约束关联了若干个变量,并指定了这些变量的合法赋值组合。
- 一元约束: 只涉及单个变量(如
X_1 ≠ 红色)。 - 二元约束: 涉及两个变量(如
X_1 ≠ X_2)。这是最常见的约束类型。 - 高阶约束: 涉及三个或更多变量。
任何高阶约束都可以被转化为一组二元约束(虽然有时需要引入辅助变量),因此二元约束是CSP理论研究的核心。我们可以用约束图(Constraint Graph) 来可视化一个CSP,其中节点代表变量,边代表它们之间存在约束。
回溯搜索
回溯搜索 (Backtracking Search)是解决CSP最基础、最核心的系统性算法。本质上是深度优先搜索(DFS)的变体,但通过“边赋值边检查”的策略,能够智能地剪掉大量无效的搜索分支。
核心思想:增量式地为变量赋值,每一步都检查当前的部分赋值是否违反了任何约束。一旦发现冲突,就立即回溯(撤销上一步赋值),并尝试其他值。如果一个变量的所有值都尝试失败,则进一步向上回溯。
算法流程
- 如果所有变量都已成功赋值,则返回解。
- 选择一个尚未赋值的变量
var。 - 对于
var域中的每一个值value: a. 尝试将value赋给var。 b. 检查这次赋值是否与之前已赋值的变量相冲突。 c. 如果不冲突,则递归调用回溯算法。 d. 如果递归调用成功返回了一个解,则直接返回该解。 - 如果
var的所有值都尝试失败,说明当前路径无解,回溯(返回失败)。
复杂度分析
- 时间复杂度: 在没有任何优化的情况下,最坏情况是 $O(d^n)$ (探索整个赋值树),其中 $n$ 是变量数量,$d$ 是域的大小。
- 空间复杂度: $O(n)$,用于存储递归调用栈的深度,即当前路径的长度。
代码实现
以澳大利亚着色问题为例:
检查函数
- 方案一:检查一个赋值是否与现有约束冲突
def checking(variable:str, assignment:dict[str, str], constraints:dict[str, list[str]]):
for neighbor, color in assignment.items():
# 检查邻居是否在约束中,并且颜色是否相同
if neighbor in constraints.get(variable, []) and color == assignment[variable]:
return False
return True
bool checking(const string& var, const map<string, string>& assignment, const map<string, vector<string>>& constraints) {
string current_color = assignment.at(var);
if (constraints.find(var) == constraints.end()) return true;
for (const auto& neighbor : constraints.at(var))
if (assignment.contains(neighbor) && assignment[neighbor] == current_color)
return false;
return true;
}
- 方案二:前向检查
在递归过程中维护一个动态变化的域副本。当给一个变量赋值后,检查与其有约束的所有未赋值的邻居,并从它们的域中移除与当前赋值冲突的值。
优点: 如果任何邻居的域因此变空,我们就可以立刻断定当前路径是死路并回溯,无需再对那个邻居进行递归。def checking(domains: dict[str, list[str]], variable: str, constraints: dict[str, list[str]], value: str) -> tuple[bool, dict[str, list[str]]]:
'''
@param domains: 变量域(地区名: 颜色列表)
@param variable: 当前地区
@param value: 当前颜色
'''
domains_copy = copy.deepcopy(domains)
domains_copy[variable] = [value] # 将当前变量的域设置为只包含当前值
for neighbor in constraints.get(variable, []):
if value in domains_copy[neighbor]:
domains_copy[neighbor].remove(value)
if not domains_copy[neighbor]:
return False, domains # 导致邻居域为空,失败
return True, domains_copy # 返回修改后的域
- 方案三:弧相容
弧相容 (Arc Consistency, AC-3)是一种更强大的推理形式。它不止检查“已赋值”和“未赋值”变量间的约束,还会检查未赋值变量之间的约束,形成“连锁反应”。
AC-3算法会系统性地移除所有弧中不 相容1的值,直到整个系统稳定。
- 复杂度分析: 时间复杂度为 $O(cd^2)$,其中 $c$ 是约束(弧)的数量,$d$ 是最大域大小。
def checking(domains: dict[str, list[str]], variable: str, constraints: dict[str, list[str]], value: str, assignment: dict) -> tuple[bool, dict[str, list[str]]]:
domains_copy = copy.deepcopy(domains)
domains_copy[variable] = [value]
queue = []
for neighbor in constraints.get(variable, []):
if neighbor not in assignment:
queue.append((neighbor, variable))
while queue:
xi, xj = queue.pop(0)
revised = False
for x_val in list(domains_copy[xi]):
if not any(x_val != y_val for y_val in domains_copy[xj]):
domains_copy[xi].remove(x_val)
revised = True
if revised:
if not domains_copy[xi]:
return False, domains
for xk in constraints.get(xi, []):
if xk not in assignment and xk != xj:
queue.append((xk, xi))
return True, domains_copy
变量选择:MRV
最小剩余价值 (Minimum Remaining Values, MRV)也称为“最受约束变量”或“fail-first”启发式,核心思想是选择域中剩余合法值最少的未赋值变量。
MRV 尽早地发现注定失败的路径,从而减少搜索的分支。def mrv(variables, domains, assignment):
unassigned_vars = [v for v in variables if v not in assignment]
return min(unassigned_vars, key=lambda var: len(domains[var]))
值选择:LCV
最少约束值 (Least Constraining Value, LCV)也称为“succeed-first”启发式。对于一个已选定的变量,LCV 会选择域中对邻居变量的域造成的“破坏”最小(即排除掉的邻居域值最少)的值。
LCV可以最大化后续选择的灵活性,增加找到解的可能性。def lcv(var, domains, constraints):
"""
@return: list - 按 LCV 规则排好序的值列表
"""
if var not in domains:
return []
def count_conflicts(value):
"""计算一个值对邻居域造成的冲突数"""
conflict_count = 0
for neighbor in constraints.get(var, []):
if value in domains[neighbor]:
conflict_count += 1
return conflict_count
# 使用 sorted 函数,key 是我们定义的冲突计数函数
return sorted(domains[var], key=count_conflicts)
整体实现
def backtracking(variables, domains, constraints, assignment={}):
'''
@param domains: dict[str, list[str]] 变量域(地区名: 颜色列表)
@param variables: list[str] 变量列表
@param constraints: dict[str, list[str]] 约束
@assignment: dict[str, str]
'''
if len(assignment) == len(variables):
return assignment # 所有变量都已赋值,找到解
# 选择一个未赋值的变量
var = mrv(variables, domains, assignment)
for value in lcv(var, domains, constraints):
assignment[var] = value
check, new_domains = checking(domains, var, constraints, value) # 此处采用方案二
if check:
result = backtracking(variables, new_domains, constraints, assignment)
if result:
return result
# 回溯
del assignment[var]
return None
树形结构CSP
如果一个CSP的约束图是树形结构(没有环),那么它可以在多项式时间内被高效解决。
算法流程:
- 拓扑排序: 对树进行拓扑排序,得到一个有序的变量序列
{X_1, X_2, ..., X_n}。 - 反向弧相容: 从后往前(从
X_n到X_1),对每一个弧Parent(X_i) -> X_i强制实现弧相容。也就是说,检查父节点的域,如果某个值找不到能与子节点兼容的值,就从父节点的域中移除它。 - 正向赋值: 从前往后(从
X_1到X_n),依次为每个变量赋值。因为经过了上一步,可以保证当你为任何变量选择一个值时,它一定不会与你之前的选择冲突。
- 复杂度分析: 时间复杂度为 $O(nd^2)$,这是线性的(相对于变量数量$n$),非常高效。
通过割集转化
对于非树形的、有环的图,可以利用割集转化(Cutset Conditioning)方法。
- 在约束图中找到一个割集 (cutset),这是一组节点,移除它们后,剩下的图就变成了树。
- 对割集中的变量进行所有可能的赋值组合。
- 对于每一种赋值,割集变量的值就变成了固定常量。这会简化剩余变量的约束,并将剩余问题变成一个树形结构的CSP。
- 高效地解决这个树形CSP。如果找到解,就与割集的赋值组合,形成一个完整解。
-
一个弧
X -> Y是相容的,当且仅当对于X域中的每个值,在Y的域中都存在一个值与之兼容。 ↩